POTÁPAČSKÉ NOVINKY
Teraz oceánske roboty lietajú sólo

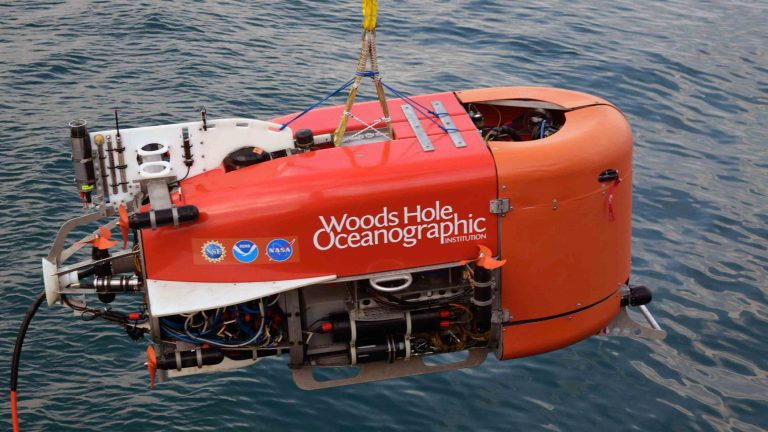
Obrázok: Evan Lubofsky, oceánografický inštitút Woods Hole.
Prvý známy prípad podvodného robota, ktorý autonómne odobral sedimentárnu vzorku, sa vyskytol na Kolumbo, aktívnej sopke 500 metrov hlboko pri gréckom ostrove Santorini v Egejskom mori.
Robotické rameno, ktoré odoberalo vzorku pre medzinárodný tím výskumníkov, bolo namontované na hybridnom diaľkovo ovládanom vozidle s názvom Nereid Under Ice (NUI), vyvinutom oceánografickou inštitúciou Woods Hole (WHOI) v Massachusetts.
„Pre vozidlo, ktoré odobral vzorku bez toho, aby šoféroval pilot, to bol obrovský krok vpred,“ povedal vedec WHOI Rich Camilli. "Jedným z našich cieľov bolo vyhodiť joystick a práve to sme dokázali."
Výskumníci študovali „drsné, chemicky zaťažené“ prostredie Kolumba a jeho mikrobiálne formy života a zároveň skúmali, do akej miery môžu oceánske roboty skúmať bez ľudského zásahu.
Inteligentné NUI veľkosti auta využíva automatizovaný plánovací softvér založený na umelej inteligencii, vrátane plánovača s názvom Spock.
To mu umožnilo rozhodnúť sa, ktoré vulkanické lokality navštíviť, a autonómne odoberať vzorky, pričom ich nasáva „hadicou na odber vzoriek“.
Podľa vedca z Michiganskej univerzity Gideona Billingsa, ktorého kód bol použitý na zozbieranie prvej vzorky, takáto automatizácia umožní NASA preskúmať oceánske svety mimo našej slnečnej sústavy.
„Ak máme túto veľkolepú víziu posielania robotov na miesta ako Európa a Enceladus [mesiace Jupitera a Saturna], nakoniec budú musieť takto pracovať nezávisle a bez pomoci pilota,“ povedal.
11 2020 januára
Budúci výskum, ktorý zahŕňa aj Austrálske centrum pre poľnú robotiku, Massachusetts Institute of Technology a Toyota Technological Institute v Chicagu, bude zahŕňať výcvik oceánske roboty vidieť ako piloti ROV, využívajúc technológiu „sledovania pohľadu“ a budovanie rozhrania v ľudskom jazyku, ktoré umožňuje vedcom osloviť roboty priamo, a nie prostredníctvom pilota.
„Nakoniec môžeme vidieť, že máme sieť kognitívnych oceánskych robotov, kde je zdieľaná inteligencia pokrývajúca celú flotilu, pričom každé vozidlo funguje kooperatívne ako včely v úli,“ povedal Camilli. "Bude to ďaleko za stratou joysticku."
Projekt bol financovaný NASA a National Science Foundation National Robotics Initiative.

